CÔNG TY TNHH SẢN XUẤT-THƯƠNG MẠI-DỊCH VỤ KỸ THUẬT HÒA BÌNH




Bộ thí nghiệm Cẩu tháp
-
Mã sản phẩm: TC-ITC
 1282
1282 -
Giá bán: Liên hệ
-
Số lượng mua:

-
Xuất xứ: Ba Lan
Chứng nhận: CO.&CQ.
Bảo hành chuẩn: 1 năm
Bảo hành mở rộng: Liên hệ
Giá Academic: Có
Giao hàng: 8-10 tuần
-
Các sản phẩm khác









Mục tiêu điều khiển: bám quỹ đạo và không quay tải
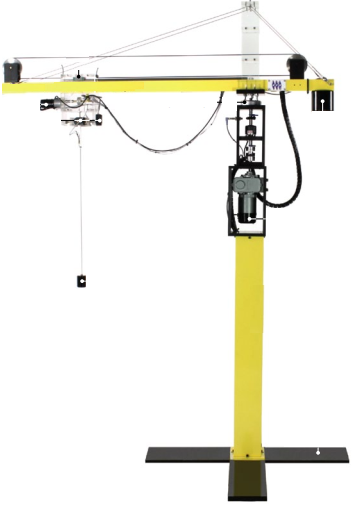
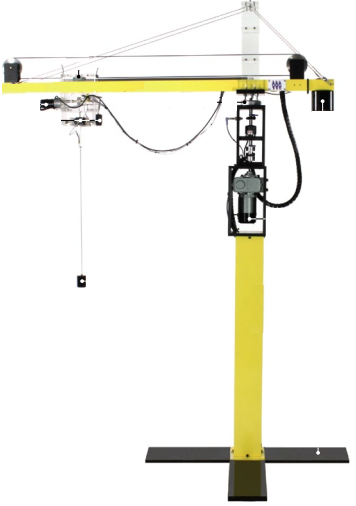
Mô hình thí nghiệm 3D của cẩu tháp phù hợp với cấu trúc hiện đại của các cẩu cho sự kết hợp tốt nhất của độ cao và khả năng nâng hạ. Mô hình thí nghiệm là một hệ thống MIMO có tính phi tuyến cao được trang bị bằng một hệ thống các cảm biến được thiết kế dành riêng - bộ đo góc 2D độc nhất.
Mỗi cẩu tháp bao gồm cần trục xoay và đối trục. Cả hai được gắn vào mặt quay hình tròn, nơi mà bệ xoay và máy móc xoay được đặt. Đối trục mang một đối trọng và cần trục xoay treo tải từ gòng. Trong mô hình của chúng tôi, mặt quay hình tròn được đặt tại đỉnh của tháp - một vòng xoay kim loại-nhựa đặc biệt được sử dụng.
 |
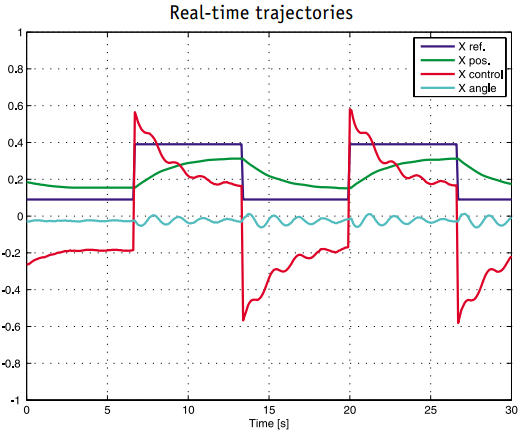 |
Hệ thống được tích hợp hoàn toàn với MATLAB/Simulink và hoạt động trong thời gian thực. Nhiều thí nghiệm điều khiển được lập trình sẵn được kèm theo. Chúng tạo thành một nền tảng đích thực để xây dựng các giải thuật mới cho người dùng. Việc thử nghiệm nhanh các giải thuật điều khiển thực tế trở thành một tác vụ dễ dàng (không đòi hỏi viết mã C). Có ba bộ lái điều khiển (động cơ DC được trang bị giảm tốc) và năm cảm biến vị trí góc (các bộ lập mã góc). Cần trục xoay quay được lái bởi bộ lái công suất thứ nhất. Gòng trên ray cần trục xoay có một khoảng hở chỉnh được được đẩy tới lui bởi dây đai truyền và bộ lái thứ hai. Tải nâng hạ được vận hành bởi bộ lái thứ ba. Mục tiêu điều khiển tiêu biểu là bám theo một quỹ đạo ba hướng (tức là vận hành tải tho cách được mô tả trước) và đồng thời giữ tải ở biên độ quay tối thiểu.
Phần cứng
- 03 động cơ DC có giảm tốc được điều khiển PWM
- Các cảm biến vị trí: loại bộ lập mã góc tăng
- Giao tiếp công suất
- Bo RT-DAC I/O loại USB ngoài hoặc PCI trong (điều khiển PWM và các Logic bộ lập mã được lưu trữ trong chíp Xilinx)
Kích thước
1200 x 1200 x 1500 mm