CÔNG TY TNHH SẢN XUẤT-THƯƠNG MẠI-DỊCH VỤ KỸ THUẬT HÒA BÌNH





Bộ thí nghiệm Hệ thống Xe dịch chuyển & Con lắc ngược
-
Mã sản phẩm: PCS-ITC
 1758
1758 -
Giá bán: Liên hệ
-
Số lượng mua:

-
Xuất xứ: Ba Lan
Chứng nhận: CO.&CQ.
Bảo hành chuẩn: 1 năm
Bảo hành mở rộng: Liên hệ
Giá Academic: Có
Giao hàng: 8-10 tuần
-
Các sản phẩm khác









Hệ thống điều khiển thời gian thực, không ổn định, phi tuyến, bậc bốn
Hệ thống Xe dịch chuyển & Con lắc ngược bao gồm một con lắc (hay cực) được gắn trên xe dịch chuyển theo cách mà con lắc có thể quay tự do chỉ trong mặt phẳng dọc. Xe dịch chuyển được lái bởi một động cơ. Để quay và để cân bằng con lắc, xe dịch chuyển được đẩy tới lui trên một thanh ray có chiều dài giới hạn.
 |
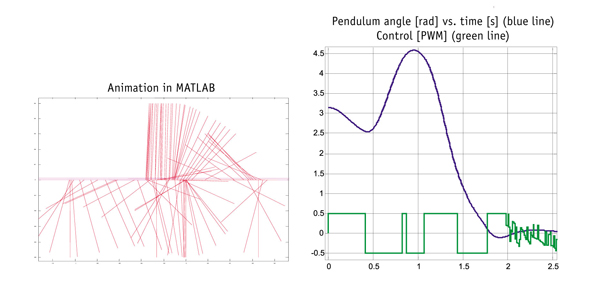 |
Mục đích của giải thuật điều khiển con lắc ngược là áp một trình tự các lực có độ lớn cưỡng bức đến xe dịch chuyển sao cho que lắc khởi động quay với biên độ tăng và nó không vượt qua các đầu cuối của ray. Que lắc quay hướng lên để đạt được một lân cận của vị trí thẳng đứng. Mỗi lần điều này được hoàn thành, bộ điều khiển đang duy trì vị trí dọc que lắc và mang xe dịch chuyển trở về giữa ray. Hệ thống hoạt động trực tiếp trong môi trường MATLAB/Simulink. Người dùng có được các thí nghiệm được lập trình sẵn trong thời gian thực nhờ sử dụng Toolbox RTWT. Người dùng cũng phát ra bộ điều khiển của riêng mình theo cách dễ dàng và rất nhanh nhờ sử dụng Simulink và thư viện của các trình lái phần cứng. Mô hình toán bậc bốn, phi tuyến và không ổn định của hệ thống cũng được kèm theo.
Phần cứng
- Hệ thống cơ khí Con lắc & Xe dịch chuyển
- Động cơ đĩa DC 12V, được điều khiển PWM
- Các ổ bi thẳng
- Khối cung cấp nguồn và giao tiếp công suất
- Bo RT-DAC I/O loại USB ngoài hoặc PCI trong (điều khiển PWM và các Logic bộ lập mã được lưu trữ trong chíp Xilinx)
Kích thước
2200 x 500 x 700 mm