CÔNG TY TNHH SẢN XUẤT-THƯƠNG MẠI-DỊCH VỤ KỸ THUẬT HÒA BÌNH





Cánh tay Robot 6 bậc tự do Meca500
-
Mã sản phẩm:
 1161
1161 -
Giá bán: Liên hệ
-
Số lượng mua:

-
Xuất xứ: Canada
Chứng nhận: CO.&CQ.
Bảo hành chuẩn: 1 năm
Bảo hành mở rộng: Liên hệ
Giá Academic: Có
Giao hàng: 8-10 tuần
-
Các sản phẩm khác
 |
|
|
|
||
|
Cực kỳ nhỏ gọn |
Tối đa hiệu quả |
Sáng tạo |
|||
|
Meca500 không chỉ nhỏ hơn hai lần so với các Robot công nghiệp khác mà bộ điều khiển của nó còn được nhúng trong đế của nó, thay vì được điều khiển trong một ca bin bên ngoài. |
Được làm bằng nhôm được gia công chính xác và các hộp giảm tốc có khe hở bằng không, Meca500 là cánh tay Robot sáu trục chính xác nhất, tự hào là Robot có độ lặp 5 μm. | Meca500 là một thành phần tự động hóa cắm vào là làm việc, vì vậy bạn có thể trải qua nhiều thời gian hơn cho sáng tạo sản phẩm của bạn hoặc tối ưu dây chuyền sản xuất của bạn. | |||
|
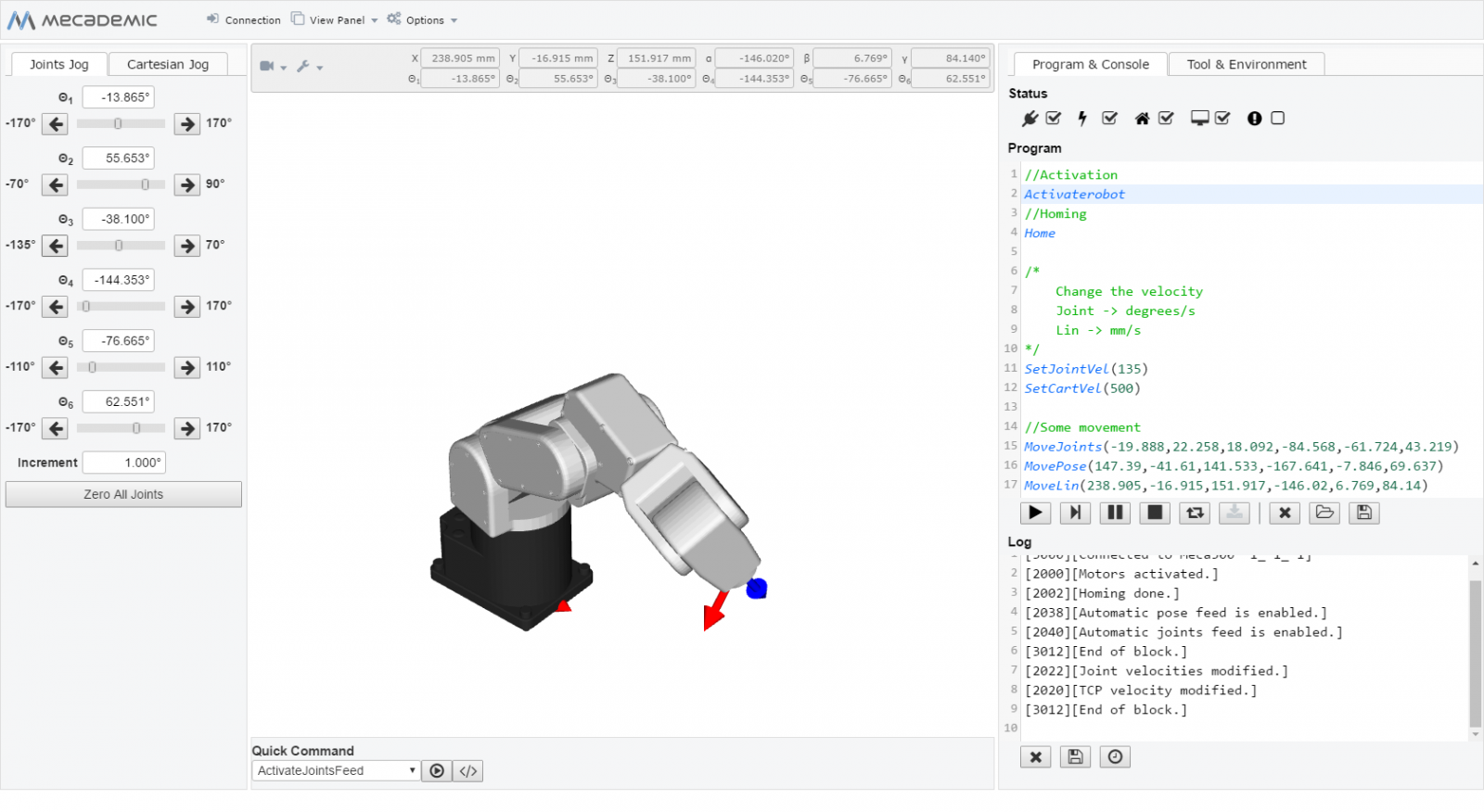
Dễ lập trình cho các kỹ sư Hãy đọc Sổ tay Người dùng và Sổ tay Lập trình để hiểu dễ như thế nào để vận hành Meca500. |
|||||
| Dữ liệu kỹ thuật |  |
||||



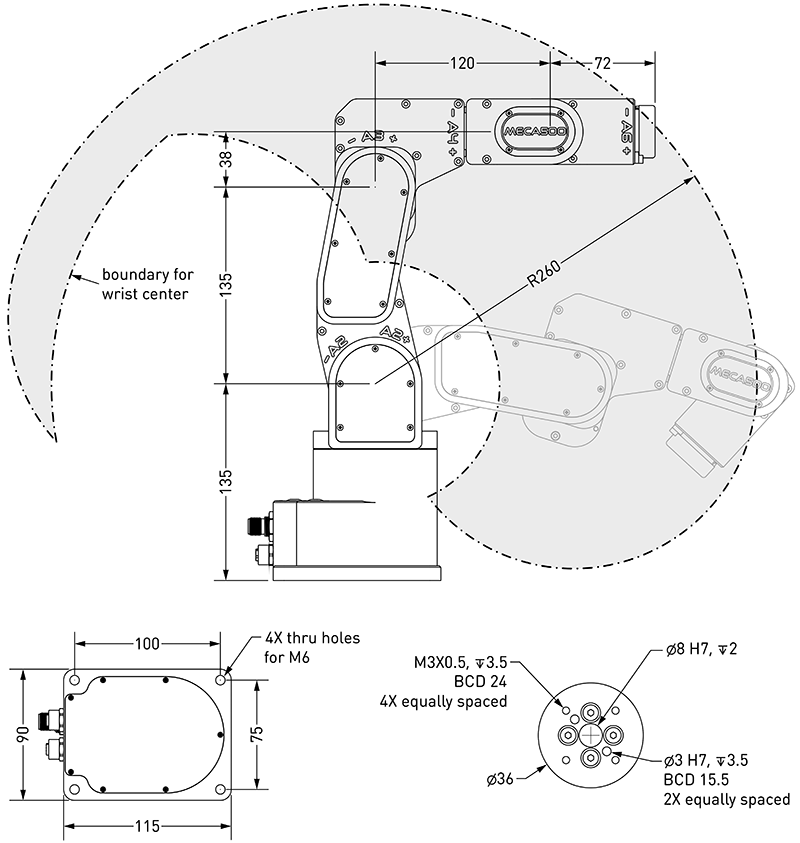
Khi mở rộng hết cỡ, chiều dài của cánh tay Robot Meca500 khoảng 332 mm. Trọng lượng Meca500 là 4.5 kg và có chịu tải 0.5 kg.
|
|
500 g
Chịu tải
4.5 Kg
Trọng lượng tổng cộng
260 mm Tầm với |
|
0 Kg Không cần bộ điều khiển bên ngoài 24 V Điện áp cung cấp |
 |
Được trang bị các bộ giảm tốc có độ hở cơ bằng không tốt nhất trên thị trường và với các bộ lập mã góc quay độ phân giải cao, và có thân được làm hoàn toàn bằng nhôm, Meca500 có độ lặp bằng 0.005 mm. Hơn nữa, bởi vì toàn bộ các chi tiết cấu trúc đều được gia công chính xác, được lắp chính xác và được kiểm duyệt tại hãng Mecademic, nên Meca500 tự hào là Robot khó sánh kịp và đường dẫn chính xác. Độ chính xác đường đi của nó tốt hơn 0.1 mm.
|
0.005 mm Độ lặp |
 |
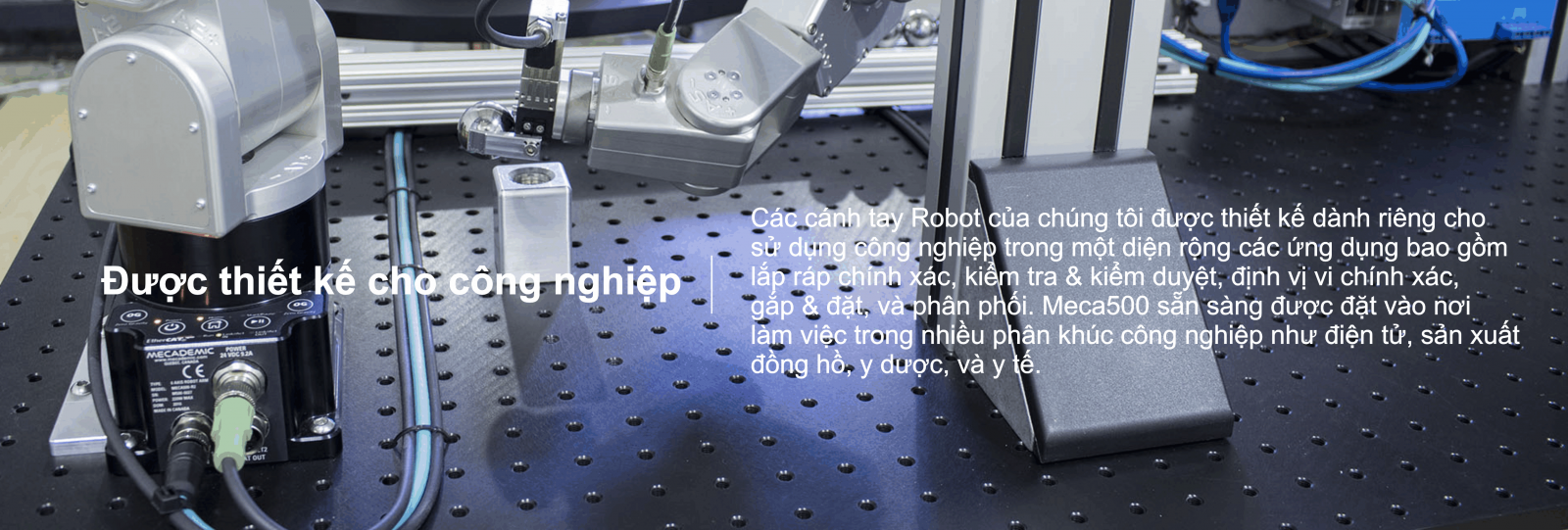
Meca500 là một thành phần tự động hóa cắm vào là làm việc, mang đến tính linh hoạt và đơn giản cực kỳ. Không cần các khóa đào tạo, không cần cài đặt phần mềm, không cần đặt mua các tùy chọn. Chỉ cần đơn giản nối Robot với một máy tính hoặc một PLC thông qua dây cáp Ethernet được cung cấp và sử dụng ngôn ngữ lập trình theo sự chọn lựa của bạn (Java, C#, Python, v.v...). Trong chương trình của bạn, hãy gửi các lệnh do Mecademic tạo ra đến cánh tay Robot (như là các chuỗi đã được phân tích loại) qua TCP/IP. Các lệnh là các lệnh Robot tiêu biểu như MoveLin(x,y,z,w,p,r). Tương tự, bộ điều khiển của Robot trả về các chuỗi với các loại hồi tiếp. Ngoài ra, một giao diện Web trực quan để vận hành Robot thường trú bên trong bộ điều khiển của Robot và có thể được truy xuất qua trình duyệt Web.
|
Ethernet |
 |
Nhiều đặc điểm mới đã được thêm vào phần dẻo Robot trong năm 2017. Thứ nhất, dựa trên các mô hình CAD được nhập vào trước (định dạng STL), Robot sẽ kiểm tra trong thời gian thực và tránh bất kỳ các giao thoa cơ khí giữa các thanh liên kết, đầu chấp hành và môi trường của nó. Thứ hai, các thuật toán hạn chế lực và chế độ hướng dẫn bằng tay sẽ được thực hiện, chuyển đổi Meca500 thành một Robot đồng hợp tác. Cuối cùng, kết nối Ethernet sẽ được phép, làm cho Robot có tính mở không giới hạn và tính mô đun hóa.
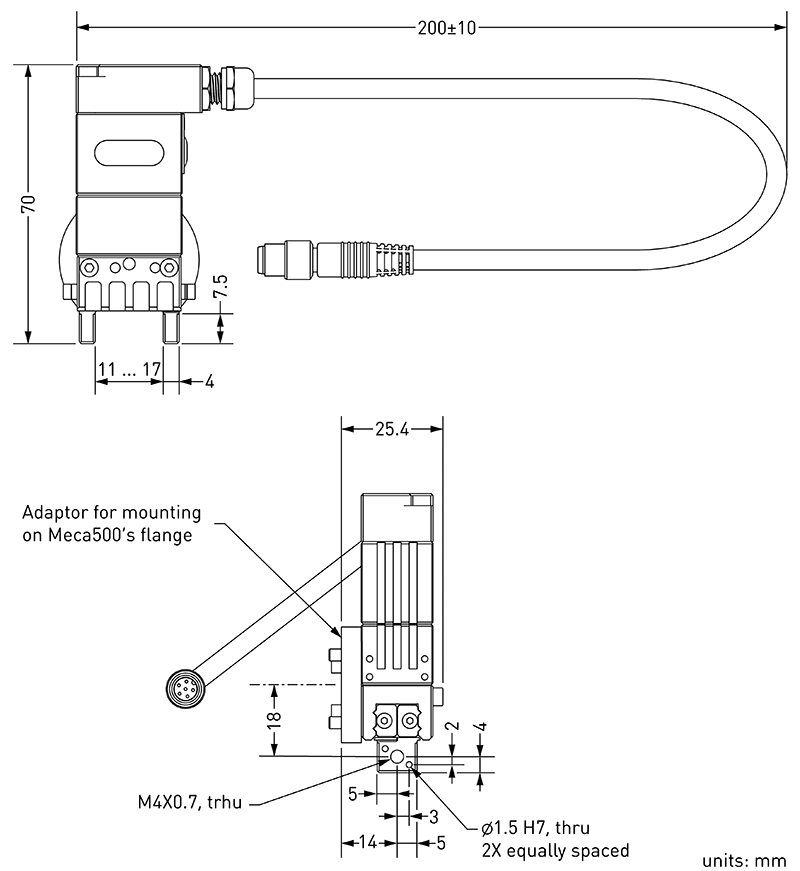
Hàm kẹp điện song song MEGP25 nhỏ gọn
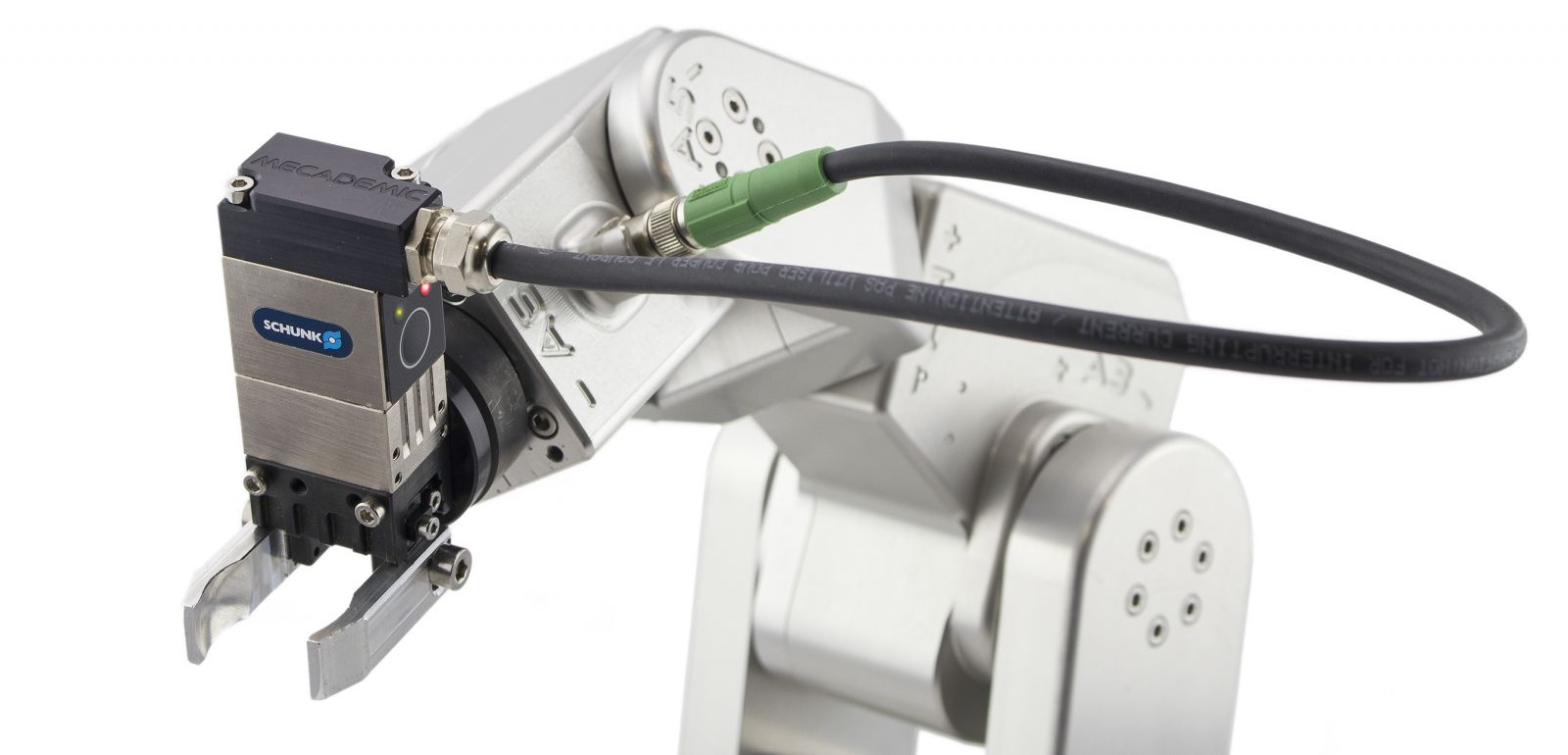
Mecademic mang đến một hàm kẹp điện song song sở hữu riêng được phát triển nhờ hợp tác với hãng SCHUNK. Hàm kẹp nhỏ gọn này hoàn toàn được tích hợp với Robot công nghiệp 6 trục Meca500 và có thể được điều khiển trực tiếp bên trong chuỗi các lệnh được sử dụng để điều khiển cánh tay Robot. Với hàm kẹp cực nhỏ gọn độc nhất này, bạn không chỉ mở và đóng các ngón tay mà còn điều khiển tốc độ của chúng và lực mà chúng sử dụng (cả kẹp trong và kẹp ngoài). Hàm kẹp được cung cấp với một tấm thích ứng cho Meca500, nhưng không có các ngón.
 |
Hành trình trên mỗi hàm | 3 mm | |
| Phạm vi lực kẹp | -40 N đến +40 N | ||
| Trọng lượng phôi gia công được đề nghị | 200 g | ||
| Trọng lượng | 120 g | ||
| Chiều dài ngón tay được phép tối đa | 32 mm | ||
| Trọng lượng được phép tối đa trên mỗi ngón | 20 g | ||
| Độ lặp | 0.020 mm | ||
| Thời gian đóng/mở hoàn tất nhanh nhất | 0.09 s | ||
| IP lớp bảo vệ | 30 |