CÔNG TY TNHH SẢN XUẤT-THƯƠNG MẠI-DỊCH VỤ KỸ THUẬT HÒA BÌNH







Bộ đào tạo Cánh tay Robot SCARA học thuật VSTONE
-
Mã sản phẩm:
 1254
1254 -
Giá bán: Liên hệ
-
Số lượng mua:

-
Giao hàng: 3-6 tuần
-
Các sản phẩm khác




|
SCARA Robot học thuật là một dụng cụ dạy lập trình để học công nghệ điều khiển Robot. Đây là một loại SCARA Robot khớp ngang giúp tiện lợi biến đổi hệ trục, ... , và cho phép bạn học lập trình điều khiển Robot dựa trên sự chuyển động của đối tượng. Ngoài ra, bạn có thể ghép vào các bút bi, v.v. kết hợp với bộ giữ bút, và học cách vẽ hình ảnh. Thân Robot đã được ráp sẵn, vì vậy bạn có thể khởi động lập trình ngay sau khi mở hộp. Phương pháp điều khiển tương ứng với hai loại trình soạn thảo chuyển động "SCARA Programmer" với chức năng trình mô phỏng và lập trình ngôn ngữ C. |
 |
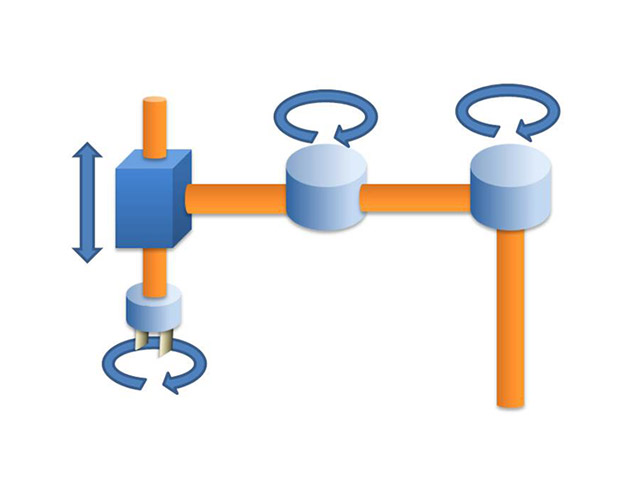
Cánh tay SCARA ROBOT khớp ngang
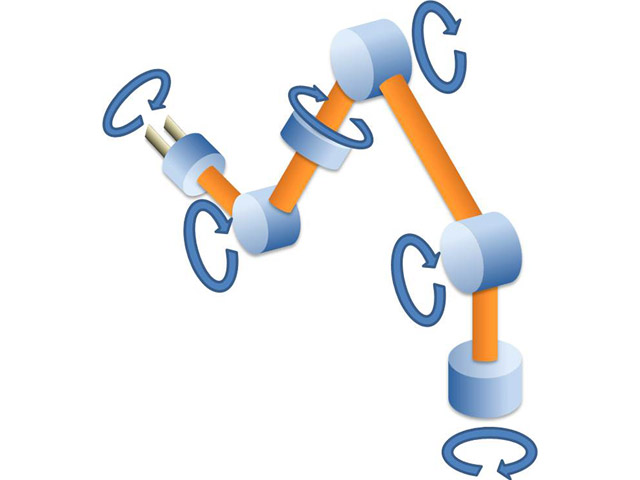
Sự chuyển đổi góc của động cơ và hệ trục tọa độ của bàn tay rất cần thiết để điều khiển cánh tay Robot, nhưng cánh tay Robot khớp ngang được sử dụng trong sản phẩm này thì dễ chuyển đổi hơn cánh tay Robot khớp dọc.
Trong trường hợp cánh tay Robot khớp dọc, vì các động cơ ảnh hưởng lên mỗi trục X/Y/Z bị vướng, nên việc chuyển đổi hệ trục tọa độ phải được thực hiện theo ba hướng nhờ sử dụng các phép tính ma trận. Mặt khác, trong trường hợp của cánh tay Robot khớp ngang, các tọa độ X (hướng ngang) và Y (hướng rộng) của bàn tay có được nhờ thêm các góc của các trục của cánh tay, và Z (hướng cao) có được chỉ với trục dọc. Hoạt động này có được nhờ các phép toán bậc trung học cơ sở và phổ thông như các hàm lượng giác. Vì phép biến đổi tọa độ có thể được thực hiện theo hai hướng, nên dễ dàng tính toán quỹ đạo để điều khiển PtoP/CP.
|
|
|
| a) Cánh tay Robot khớp dọc | a) Cánh tay Robot khớp ngang |
Có thể được sử dụng để vận chuyển đối tượng và vẽ
Vì sản phẩm này là một phiên bản được lắp ráp sẵn hoàn toàn, vì vậy không cần phải lo lắng về các lỗi hoạt động sai hoặc lỗi lắp ráp, vì vậy bạn có thể tập trung ngay vào việc học lập trình. Có tất cả 5 trục: 2x trục cánh tay; 1x trục dọc; 1x trục xoay bàn tay; 1x trục đóng/mở bàn tay. Ngoài ra, để vẽ, chỉ cần thay đổi các phụ kiện bộ giữ bút là xong.
Dạng bàn tay (5 trục)
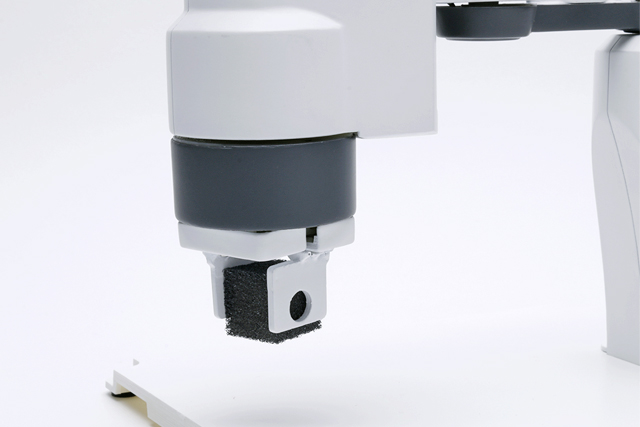 |
Điều kiện chuẩn. Được trang bị một bàn tay có trục xoay trên bàn tay, học lập trình như nắm giữ / chuyển các đồ vật và tránh các vật cản. Trục bàn tay có một độ mở rộng 20 mm, và bề rộng trục phạm vi 5 mm đến 50 mm (chọn từ bốn vị trí để lắp đặt các cam). Các lỗ được khoan móng, giúp dễ kẹp các quả bóng và các đối tượng phức tạp khác. |
| Dạng bút (3 trục) | |
 |
Nó ở trạng thái này khi nó được thay thế bộ giữ bút. Một bút (bút bi, bút vẽ, v.v.) được gắn vào bàn tay, và một tờ giấy A5 được gắn chặt đế, và các hình ảnh có thể được vẽ. Đối với các mục đích học, có thể lập trình các ký tự, các hình vẽ, các đồ thị, và các quỹ đạo điều khiển PtoP / CP. |
Có thể sử dụng hai dạng điều khiển: phần mềm GUI và lập trình ngôn ngữ C
Bộ Robot được nối đến PC thông qua USB để điều khiển truyền thông. USB HID không đòi hỏi việc cài đặt trình lái phần cứng (Driver) thiết bị. Ngoài ra, hai loại phần mềm điều khiển có sẵn: SCARA Programmer, một trình soạn thảo chuyển động được thiết kế riêng ở dạng GUI, và lập trình ngôn ngữ C.
SCARA Programmer, trình soạn thảo chuyển động được thiết kế riêng
SCARA Programmer là một trình soạn thảo chuyển động kèm theo chức năng mô phỏng. Phần mềm ở định dạng GUI và có thể dễ dàng được vận hành chỉ với bằng chuột. Trình mô phỏng được liên kết với Robot trong thời gian thực, và bạn có thể dạy (chụp) các thế đứng và các chuyển động từ Robot thực và điều khiển Robot thực tế bằng cách kéo Robot trên trình mô phỏng bằng chuột.
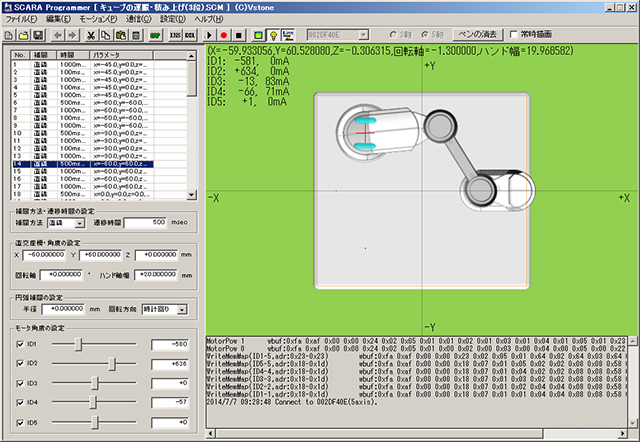
Ngoài ra, góc động cơ và các tọa độ của đầu cánh tay tự động được chuyển đổi, và các tọa độ có thể được nhập vào để phát sinh thế đứng. Hệ tọa độ như hướng và gốc Robot có thể được thay đổi tùy theo môi trường vận hành của bộ phận chính.
Trong việc tạo chuyển động, bạn có thể chọn lựa phương pháp nội suy giữa các thế đứng (đường thẳng/vòng tròn) và thực hành điều khiển PtoP/CP. Ngoài ra, quỹ đạo của bàn tay Robot có thể được vẽ trên trình mô phỏng, và việc lập trình có thể được thực hiện trong khi kiểm tra quỹ đạo của Robot.
Lập trình ngôn ngữ C
Để lập trình ngôn ngữ C, Microsoft Visual Studio Express (miễn phí) có thể được sử dụng như một môi trường phát triển. Ngoài ra, nhiều quá trình được đòi hỏi cho điều khiển Robot như nguồn mẫu, ngay cả người bắt đầu có thể dễ dàng học được cách điều khiển Robot như thế nào.
Hỗ trợ OpenRMT-aits
 |
Một chương trình mẫu cho Robot màu học thuật được phân phối miễn phí trên trang web chính thức của phần mềm trung gian RT "OpenRTM-aist" được phát triển và phân phối bởi Viện Khoa học và Công nghệ Công nghiệp Tiên tiến Quốc gia (Japan) Trong chương trình mẫu này, bạn có thể trải nghiệm OpenRTM-aist mà không cần cài đặt môi trường RTM trên bộ nhớ USB. Trong chương trình mẫu cho Robot màu học thuật, có thể dễ dàng điều khiển robot chỉ bằng cách viết lệnh trong tệp CSV. |
Xin lưu ý: Chương trình mẫu OpenRTM-aist đã được phát hành bởi những nỗ lực của các bên liên quan, bao gồm Phòng thí nghiệm Kỹ thuật Thiết kế Đại học Saitama. Vstone Co., Ltd. không thể trả lời các câu hỏi hoặc câu hỏi liên quan đến hoạt động của chương trình mẫu.
| Kích cỡ (mm) rộng × dài × cao |
W210 x D230 x H200 (trục dọc xuống tối đa, bao gồm cả chân cao su) |
 |
|---|---|---|
| Trọng lượng | Khoảng 570g | |
| Cấu hình trục |
- 02 trục xoay (5 trục tổng cộng) |
|
| Phạm vi chuyển động | Trục 1: ± 135 ° Trục 2: ± 135 ° Trục 3: ± 35mm lên và xuống Trục 4: ± 150 ° Trục 5: Bề rộng tay chấp hành ± 10mm |
|
| Chiều dài liên kết trục ngang | Trục 1 đến trục 2: 80mm, trục 2 đến trục 3: 80mm | |
| Động cơ được dùng | RS304MD (Futaba Electronics Industries) x 5 | |
| Cung cấp nguồn | Bộ thích ứng AC (DC5V) | |
| Giao tiếp | USB HID (mini-B) | |
| Nguyên liệu khung | Resin | |
| Phần mềm |
■ Trình soạn thảo chuyển động "SCARA Programmer" Tương thích với Windows XP/Vista/7/8/8.1/10 (đòi hỏi DirectX9.0b hoặc sau này). Thế đứng có thể được nêu rõ dựa trên hệ tọa độ vuông góc, phương pháp nội suy thế đứng có thể được thiết lập (đường thẳng/cung), chức năng trình mô phỏng được trang bị, dạy thế đứng/chuyển động, điều chỉnh hệ trục tọa độ. Có thể sử dụng ngôn ngữ C để lập trình. |
|
| Phụ kiện khác | Cáp USB, bộ thích ứng AC, bút bi, chân nhựa x 4, ghim kẹp x 4, xốp lập phương (20mm) x 3, phụ kiện lắp bút, ốc siết M3 x10 x 2, hộp đựng. | |
* Lưu ý rằng các thông số kỹ thuật của sản phẩm có thể thay đổi mà không báo trước.