CÔNG TY TNHH SẢN XUẤT-THƯƠNG MẠI-DỊCH VỤ KỸ THUẬT HÒA BÌNH





Mô đun thí nghiệm Gối đỡ từ
-
Mã sản phẩm: MB-ITC
 1284
1284 -
Giá bán: Liên hệ
-
Số lượng mua:

-
Xuất xứ: Ba Lan
Chứng nhận: CO.&CQ.
Bảo hành chuẩn: 1 năm
Bảo hành mở rộng: Liên hệ
Giá Academic: Có
Giao hàng: 8-10 tuần
-
Các sản phẩm khác









Minh chứng cho sự điều chỉnh độ hở giữa trục và gối đỡ
Phần mềm cho gối đỡ từ được thiết kế riêng cho hai nền tảng phần cứng: FPGA và Thời gian thực. FPGA hỗ trợ các phép đo các cảm biến sau đây:
|
- Vị trí của trục so với các gối đỡ từ - Vị trí góc của trục FPGA cũng phát ra sáu tín hiệu PWM để điều khiển các chấp hành sau: - Bốn cuộn dây của gối đỡ - Động cơ DC lái trục - Nhiễu loạn (một sự thay đổi trong sự thiếu cân bằng trục) |
 |
Sự không cân bằng được đo theo đơn vị [µm] được trình bày trong hình bên trái. Độ hở ban đầu 14 µm trên trục x được giảm xuống độ hở 11 µm. Tương tự trên trục y, độ hở ban đầu 18.5 µm được giảm xuống 10 µm.
Nếu trục được kéo tải (bị nhiễu loạn) nó có thể được điều chỉnh trong ít giây. Động lực học Rotor có thể được cấu hình nhờ vào sự điều khiển gối đỡ từ tích cực. Thực tế, trục được truyền động nhờ từ trường được phát ra bởi bốn cuộn dây.
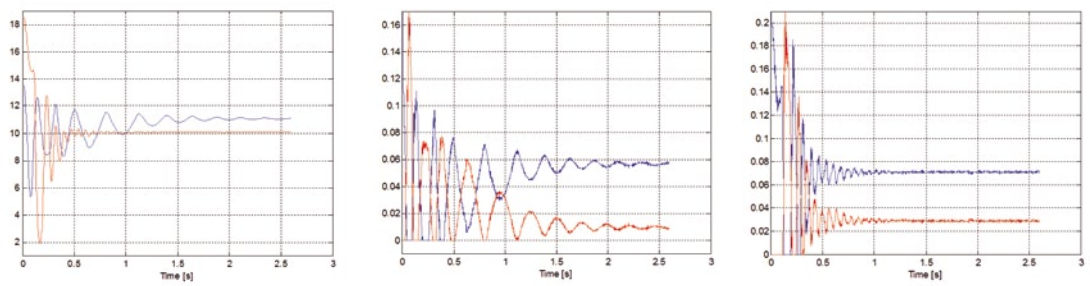
Hai dòng điện điều khiển đi vào hai cuộn dây được kết hợp với trục x (xem hình ở giữa). Hai dòng điện khác đi vào hai cuộn dây được kết hợp với trục y (xem hình bên phải). Các giản đồ thời gian trong cả hai hình được chia tỉ lệ theo đơn vị Volt, tuy nhiên các tín hiệu này tỉ lệ với dòng điện của các cuộn dây.
Giải thuật điều khiển chính chạy trên nền tảng RT. Cũng có các thủ tục để kiểm soát và/hoặc quá trình thu thập dữ liệu. Việc điều khiển gối đỡ từ được thực hiện trong môi trường MATLAB/Simulink nhờ sử dụng các Toolbox cho phép phát sinh tự động các tác vụ thời gian thực.
Phần cứng
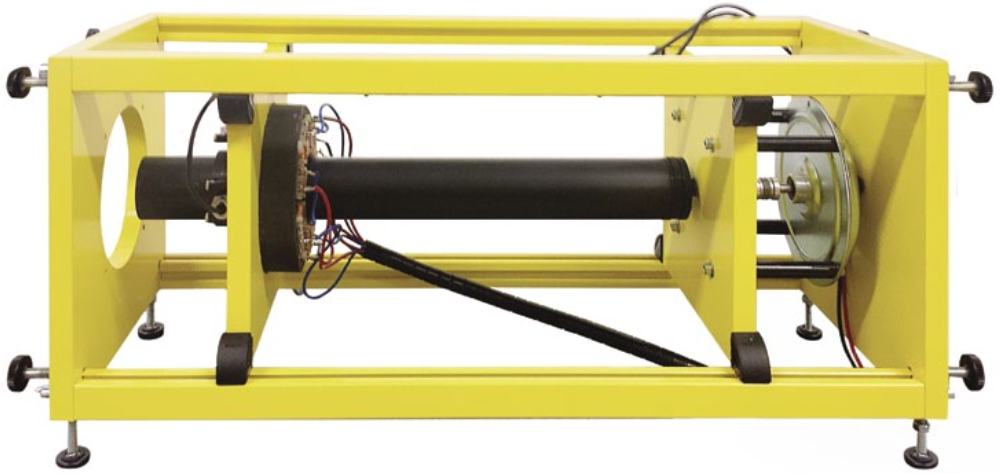
- Khung được trang bị gối đỡ từ và gối đỡ thông thường, trục xoay, động cơ DC và khớp nối
- Giao tiếp công suất
- Bo RT-DAC I/O PCIe nội
Kích thước
200 x 230 x 590 mm